
통합 검색
통합 검색
- 작성자 hide
- 조회수 327
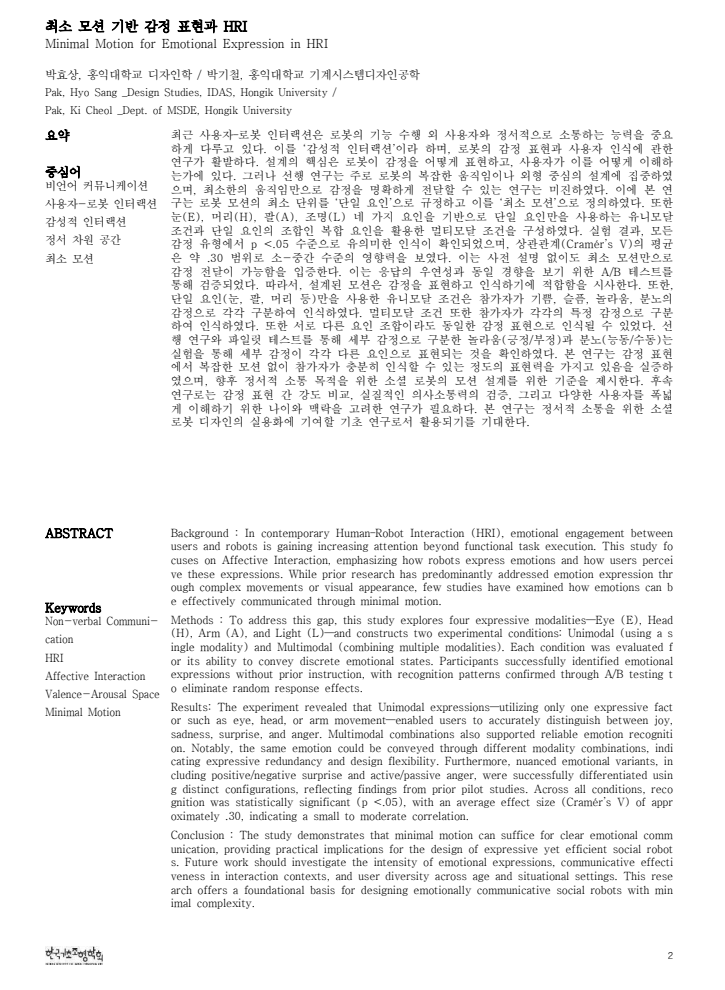
Topic: Minimal motion for Emotional Expression in Human–Robot Interaction(HRI)
This study aims to empirically examine the possibility of expressing emotions in Human–Robot Interaction (HRI) through minimal motion and to propose design strategies for social robots based on these findings. In recent years, robots have been expected to go beyond mere functional task execution and instead engage in affective interaction that fosters emotional bonds and communication with users. How a robot expresses emotions and how users perceive them as social signals are critical factors in determining the quality of interaction, making this an important area of research in robot design. Previous studies have largely focused on complex movements or external features, but these approaches often involve high implementation costs and lack consistency in interpretation. In contrast, the potential of minimal motion to effectively convey emotions has not been sufficiently explored. Therefore, this study defines the smallest unit of robot motion, termed the “single factor,” as minimal motion and verifies its effectiveness in emotional expression and recognition.
The study set four primary expressive factors—eyes, head, arms, and lighting—and designed two conditions: unimodal (using a single factor) and multimodal (using combinations of factors). The unimodal condition tested whether a single factor alone could communicate emotions, while the multimodal condition examined whether different factor combinations could express the same emotion, or whether a single factor might be interpreted as different emotions depending on the context. The targeted emotions were based on basic emotion theory—joy, sadness, surprise, and anger—while surprise was further divided into positive and negative, and anger into active and passive, for a more refined analysis.
The experiment involved 30 university students in their 20s, and an A/B testing method was applied to examine differences in recognition depending on prior explanation. Group A received an explanation of emotion scenarios, while Group B was presented with only the motions and asked to select emotion words without prior guidance. This design allowed the study to determine whether recognition arose from the motion itself or from external explanation. The experiment was conducted in a controlled environment, with stimuli presented on a large screen to approximate real robot size. Statistical analysis was performed using SPSS 29.0, employing cross-tabulation, logistic regression, frequency analysis, chi-square tests, and Cramér’s V to ensure validity.
The main findings are as follows. First, the A/B test showed no significant difference between groups, demonstrating that participants could recognize emotions even without prior explanation. Second, in the unimodal condition, single factors alone were sufficient to distinguish the four basic emotions. For instance, the simple activation of the eyes was perceived as joy, head tilting downward as sadness, and arm raising as anger, with statistically significant results. Third, in the multimodal condition, combinations of factors produced meaningful variations in recognition, showing that the same emotion could be expressed through different factor combinations, thereby offering redundancy and flexibility in design. Fourth, mapping the results onto the Valence–Arousal space confirmed that surprise was divided into positive and negative, while anger was distinguished as active or passive, with passive anger closely overlapping with sadness. This indicates that minimal motion can convey not only broad emotional categories but also nuanced dimensions of affect. Fifth, frequency analysis revealed that the head factor had the greatest influence on emotion recognition, followed by the eyes, with lighting and arms showing lower effects.
In conclusion, this study demonstrates that emotions can be effectively expressed and recognized through minimal motion, confirming that simple and intuitive movements are sufficient for affective communication. This suggests that designers of social robots can avoid unnecessary complexity and achieve efficient yet expressive designs. Furthermore, the fact that the same emotion can be communicated via multiple factor combinations highlights the potential for flexibility and scalability in robot design. By showing that minimal motion can achieve both efficiency and clarity in emotion transmission, this study provides a practical foundation for designing emotionally communicative social robots.
Future research directions include: (1) comparing recognition intensity across unimodal and multimodal conditions, (2) examining the amplification effects of secondary factors such as lighting, (3) expanding the participant base to include diverse age groups and cultural backgrounds, (4) testing with actual robot prototypes to validate the transferability of results beyond screen-based experiments, and (5) incorporating more complex emotional scenarios to evaluate communicative effectiveness in realistic contexts. Such extensions will strengthen the generalizability and reliability of robot designs aimed at emotional communication.
Ultimately, this study establishes that minimal motion is not only theoretically viable but also a practical and effective strategy for HRI design. It highlights how robots can evolve beyond functional tools to become emotional partners capable of genuine affective engagement with humans.
주제: 최소 모션 기반 감정 표현과 HRI
본 연구는 인간–로봇 인터랙션(Human–Robot Interaction, HRI)에서 최소한의 움직임을 활용하여 감정을 표현하고 사용자가 이를 인식할 수 있는 가능성을 실증적으로 검증하는 데 목적이 있다. 최근 로봇은 단순히 기능적 작업을 수행하는 것을 넘어, 정서적 유대 형성과 소통을 통해 사용자와 교감하는 감성적 인터랙션(Affective Interaction)의 중요성이 강조되고 있다. 로봇이 감정을 효과적으로 표현하고 사용자가 이를 사회적 신호로 받아들일 수 있는지는 인터랙션의 품질을 결정하는 핵심 요소이며, 이는 로봇 디자인 및 설계에서 매우 중요한 연구 과제이다. 기존 연구들은 주로 복잡한 움직임이나 외형적 요소, 다채로운 모션 조합을 활용한 감정 표현에 집중해 왔다. 그러나 이러한 방식은 구현 비용이 크고 해석의 일관성을 담보하기 어렵다는 한계가 있으며, 최소한의 움직임으로 감정을 효과적으로 전달할 수 있는 가능성은 충분히 탐구되지 않았다. 이에 본 연구는 로봇 모션의 가장 작은 단위인 ‘단일 요인’을 최소 모션(minimal motion)으로 정의하고, 이 최소 모션이 감정 표현 및 인식 과정에서 갖는 효용성을 실증적으로 검증하였다.
연구에서는 눈(Eye), 머리(Head), 팔(Arm), 조명(Light)의 네 가지 요인을 설정하고, 이들을 독립적으로 사용한 유니모달(Unimodal) 조건과 조합하여 활용한 멀티모달(Multimodal) 조건을 구성하였다. 유니모달 조건에서는 단일 요인만으로도 감정 전달이 가능한지를 검증하였으며, 멀티모달 조건에서는 서로 다른 요인 조합이 동일한 감정을 표현할 수 있는지, 혹은 동일한 요인이 다른 감정으로 해석될 수 있는지를 분석하였다. 연구 대상 감정은 기본 감정 이론에 기반해 기쁨, 슬픔, 놀라움, 분노의 네 가지로 설정되었으며, 놀라움은 긍정적/부정적으로, 분노는 능동적/수동적으로 세분화하여 보다 정교한 구분을 시도하였다.
실험은 20대 대학생 30명을 대상으로 진행되었으며, A/B 테스트를 통해 사전 설명 제공 여부에 따른 인식 차이를 검증하였다. A그룹은 감정 시나리오에 대한 사전 설명을 받았고, B그룹은 설명 없이 모션만 제시받아 감정 단어를 선택하게 하였다. 이를 통해 감정 인식이 단순한 우연에 의한 결과인지, 혹은 모션 자체의 정보로 인한 결과인지를 구분하였다. 모든 실험은 외부 방해를 최소화한 환경에서 진행되었으며, 실제 로봇 크기와 동일한 화면을 통해 제시된 모션 영상을 기반으로 하였다. 분석에는 SPSS 29.0을 활용하였으며, 교차분석, 로지스틱 회귀분석, 빈도분석, 카이제곱 검정, Cramér’s V 등을 적용하여 통계적 타당성을 확보하였다.
주요 결과는 다음과 같다. 첫째, A/B 테스트 결과 사전 설명 여부에 따른 응답 차이가 나타나지 않아, 별도의 설명 없이도 최소 모션만으로 감정 인식이 가능함을 입증하였다. 둘째, 유니모달 조건에서 단일 요인만으로도 네 가지 기본 감정의 구분이 가능하였다. 예를 들어, 눈의 단순 켜짐은 기쁨으로, 머리 숙임은 슬픔으로, 팔의 들기 동작은 분노로 인식되었으며, 이러한 경향은 통계적으로 유의한 결과를 보였다. 셋째, 멀티모달 조건에서는 요인 조합에 따라 동일한 감정이 다양한 방식으로 표현될 수 있음을 확인하였다. 즉, 서로 다른 요인 조합이 동일 감정으로 인식될 수 있어 설계의 중복성과 유연성이 확보됨을 보여주었다. 넷째, 정서 차원(Valence–Arousal) 분석 결과, 놀라움은 긍정과 부정으로, 분노는 능동과 수동으로 구분되어 나타났으며, 특히 수동적 분노는 슬픔과 정서적으로 유사한 위치에 분포하였다. 이는 감정 인식에서 최소 모션이 정교한 차원 구분까지 가능하다는 점을 보여준다. 다섯째, 빈도분석 결과 요인별 영향력은 머리 > 눈 > 조명 = 팔 순으로 나타났으며, 이는 감정 인식에서 얼굴과 머리 부위가 중요한 역할을 한다는 기존 연구와도 일치한다.
결론적으로 본 연구는 최소 모션만으로도 감정을 명확히 전달하고 인식할 수 있음을 실증하였다. 이는 사회적 로봇 디자인에서 불필요하게 복잡한 모션 설계를 줄이고 단순하면서도 직관적인 표현만으로도 충분히 정서적 소통이 가능함을 시사한다. 또한 동일 감정이 다양한 요인 조합으로 표현될 수 있다는 점은 로봇 설계에 있어 유연성과 확장성을 확보할 수 있는 기반이 된다. 본 연구는 복잡성을 최소화하면서도 효과적인 감정 전달을 가능케 하는 설계 전략을 제시함으로써, 감성적 소통을 목표로 하는 사회적 로봇 디자인의 실용화에 기초적인 학문적 근거를 제공하였다.
향후 연구에서는 첫째, 유니모달과 멀티모달 조건 간의 감정 인식 강도 차이를 비교하고, 둘째, 조명 요인과 같은 보조적 요인의 증폭 효과를 세부적으로 검증하며, 셋째, 더 다양한 연령과 문화적 배경을 가진 사용자 집단을 대상으로 실험을 확장할 필요가 있다. 넷째, 실제 로봇 프로토타입을 활용한 현장 실험을 통해 모니터 기반 실험에서 확인된 결과가 동일하게 재현되는지를 검증해야 한다. 다섯째, 보다 복잡한 감정과 세분화된 모션 조건을 반영하여 현실적인 의사소통 상황에서의 효과성을 검토할 필요가 있다. 이러한 후속 연구는 사회 전반에서 정서적 소통을 강화하는 로봇 설계의 보편성과 신뢰성을 높이는 데 기여할 것이다.
결과적으로 본 연구는 최소 모션 기반 감정 표현이 단순한 이론적 가능성을 넘어 실질적이고 효율적인 HRI 설계 전략이 될 수 있음을 보여주었다. 이는 로봇이 단순히 기능적 도구를 넘어, 인간과 감정을 나누는 정서적 파트너로 발전하기 위한 중요한 토대를 마련하는 연구라 할 수 있다.
댓글 0